The U.S. Army loves its toys and pays a lot of money for them, so it naturally gets disappointed when it can’t bring its expensive gadgets everywhere it wants to go. In the 1980s, the Army figured that around half of the landmass on the planet was impassable by conventional wheeled or tracked vehicles, a.k.a. its entire ground fleet. This was clearly a problem, so it partnered with Ohio State University and a few outside contractors to develop the Adaptive Suspension Vehicle: a truck-sized, six-legged hydraulic robot manned by a solo operator.
Although it was very complex and equally slow, it was a successful attempt to get artificial legged locomotion off the pages of science fiction and into reality, beating Boston Dynamics to the creepy mechanized animal game by a good two decades.
Funded by the Defense Advanced Research Projects Agency (DARPA), the ASV project began at OSU in January of 1981. Under the lead of Robert McGhee and Kenneth Waldron—both professors at the university—the machine was developed over the next nine years. Unlike other more crude experiments that came before it, OSU’s machine would incorporate an array of 17 computers to ensure the vehicle’s operator wasn’t physically and mentally exhausted after a day of managing every step taken by the ASV’s six legs.

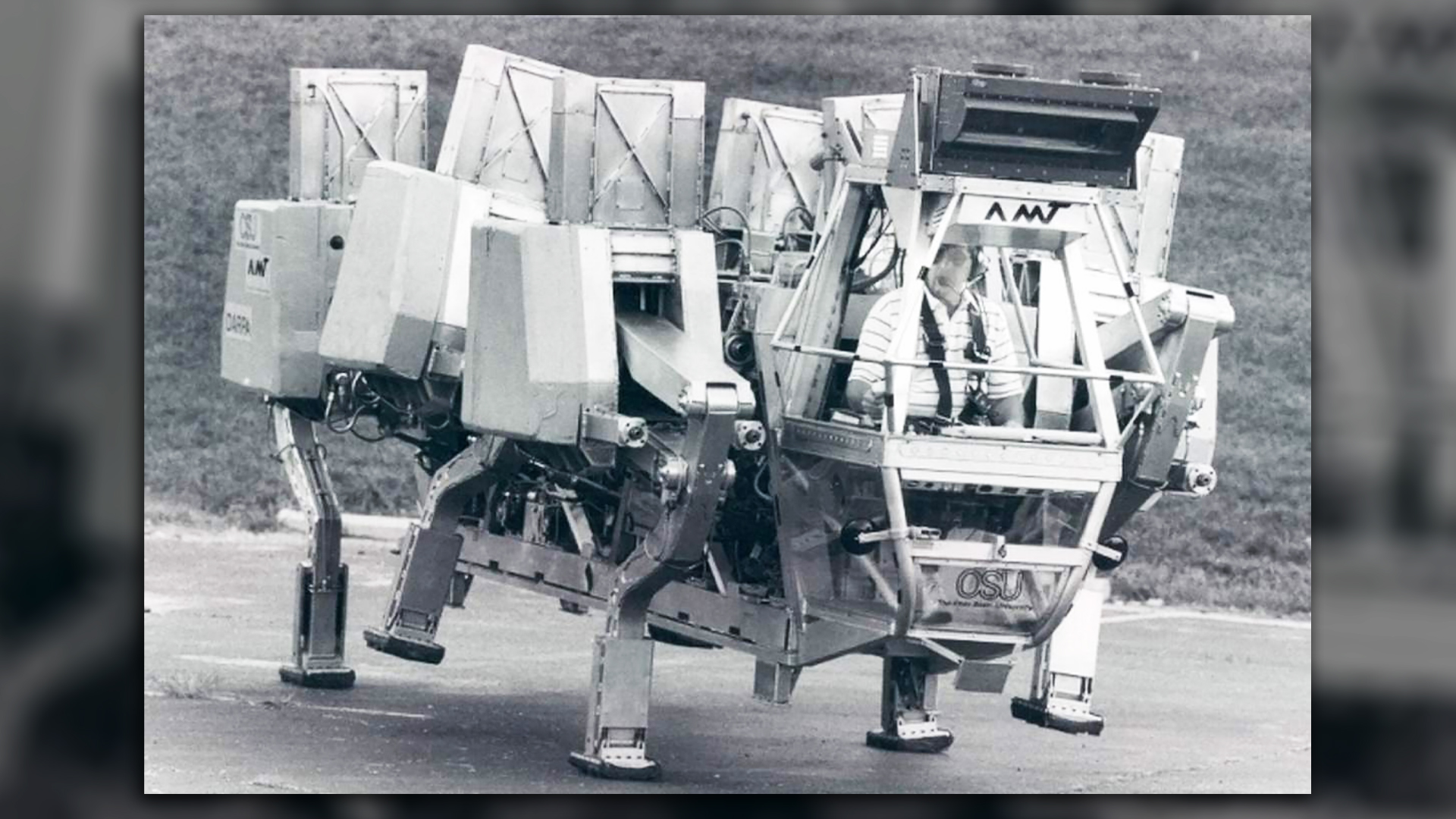
Keep in mind that these computers are incredibly weak by today’s standards. Those massive rectangular boxes you see above the vehicle’s metallic shoulders are not some sort of hydraulic reservoir, they each house one of the six Intel “86/30” 128k, 8-bit computers that controlled the legs.
The rest, 11 in total, did various other tasks, like controlling the CRT displays inside the cockpit, analyzing all of the data gathered from the legs and the pressure sensors in the feet, and determining the best footing for the machine based on data from a 128×128-pixel scanning rangefinder mounted above the cab. All of this data was then interpreted by the vehicle’s operating software—written in Pascal and consisting of 150,000 lines of source code—to make the ASV saunter along.
That’s where the computerized element ends, and the mechanical and human elements begin. The vehicle is described as being more “supervised” than really driven. The operator instructs the ASV where to go with a keypad and joystick, and then it sets off in that direction. It’s implied in some of the literature that the end goal was to make this machine autonomous, however, the OSU team was clearly limited by the processing power at the time—even though they were receiving a million bucks from DARPA every year to fund the project.

OSU Adaptive Suspension Vehicle
That money was not just put to use on the vehicle’s computers, of course, because the mechanical systems to make the ASV walk were equally complex.
At the heart of the machine was a 900cc motorcycle engine with a peak output of 91 horsepower, but it wasn’t just powering one massive hydraulic pump. Between the engine and the 18 variable displacement pumps—yes, 18—driving the vehicle’s hydraulic cylinders was a 100-pound flywheel. It spun up to 12,000 rpm and could store .25 kWh of energy. That means it could output 250 watts worth of power—about one-third horsepower—for one hour, or a much larger amount of power for a much shorter period of time.
This was useful because the ASV’s 18 pumps were driven by a rather complex system. The engine delivered power from its output shaft to three separate driveshafts via toothed belts. These ran the entire length of the vehicle, which, in turn, transferred power to the pumps—three per leg—via more toothed belts. To complete particularly high-energy maneuvers in this high-friction system, the vehicle needed more power than the engine could produce.
This is when the energy stored in the flywheel was utilized. The flywheel also allowed the vehicle to recuperate some energy from the pumps when the ASV came to a stop—like regenerative braking in a hybrid car—and ensured a smooth shutdown in case of a sudden loss of power.

Thanks to this complex drive system, the vehicle could walk at a maximum speed of eight miles per hour, although it’s said that pace made for a jarring ride. Cruising speed was closer to four miles per hour. It could also do more than just walk and run. It had six different drive modes, including utility (a diagnostic mode), precision footing, close maneuvering, follow the leader, terrain following, and cruise/dash.
That being said, the slow cruising speed limited the ASV’s practicality. This speed was not only limited by the amount of jostling the operator could handle, but also its weight. At 5,952 pounds, it was heavy. It could also only carry a sustained payload of 485 pounds, which is officially…not enough.
Lastly, it was 17 feet long, 7.9 feet wide, and 9.8 feet tall—a large vehicle to carry such a small payload. Despite being able to step over vertical obstacles as tall as 6.9 feet and traverse trenches as wide as 23 feet, the military gradually lost interest and the program was axed in 1990.

Now, if you’re expecting a wild goose chase to find this machine’s current whereabouts—like in my Big Red turbine truck story—you might just get one. A source indicates the machine’s current location is unknown. It’s speculated that it’s just packed away somewhere on the OSU campus, however, I don’t know for sure. I have contacted the University of Ohio’s engineering department in an attempt to gather more information.
Until then, all we can do is marvel at this massive machine lumbering around on its six insect-like legs. It’s taken a long time for companies like Boston Dynamics to really turn legged locomotion into a reality, but even those machines don’t carry people yet. As much as I would want to saddle up and ride one of its “Big Dog” robots, I’m afraid it’s not in the cards at the moment. I will keep asking, however.
Got a tip? Send us a note: tips@thedrive.com
Loading comments…
Comments couldn’t be loaded. Please refresh the page.