[Editor’s note: Kartik Tiwari is the CTO of Starsky Robotics, a company that is enabling long-haul trucking without an onboard driver. Their vehicles have been a challenge to cover, given that they use a unique mix of automated driving and teleoperation, and thus don’t fit into any one easy category. In today’s expert insight post, Tiwari explains why this approach makes sense from a technical and safety perspective… if not from a terminology perspective.]
One difficult thing about autonomy is that it’s a compounding problem. It’s difficult to solve the first 90 per cent of driving, and it’s just as difficult again to solve the next nine per cent, and as difficult again to solve the next 0.9 per cent, and so on. Each of those nines is as difficult to solve as the previous one. Getting to something like 99.9999% of autonomy may entail spending hundreds of billions of dollars—and still there’ll be safety risks that make it problematic to remove the human from the vehicle.
However, it’s possible to bridge the gap from the current state of autonomy with tele-operation technology—allowing a human to supervise the vehicle at a distance. The trouble with that is, tele-operation also is a compounding problem. Creating tele-operation technology that solves 90 per cent of driving situations is difficult, and it’s just as difficult to solve the next nine per cent, likewise the next 0.9, and so on.
That sounds bad, right? Because that sounds like the solution is to solve two compounding problems. But at Starsky Robotics we’ve been working on the two technologies for three years, and we’ve discovered that tele-operations and autonomy exist in a strangely appropriate, complementary relationship. Their strengths and weaknesses fit together like puzzle pieces. Autonomy is easy where tele-operation is difficult. Also, the inverse is true: Tele-operation is easy where autonomy is difficult. And by combining the two, it’s possible to solve 100 per cent of driving—to completely remove the human driver from the vehicle.
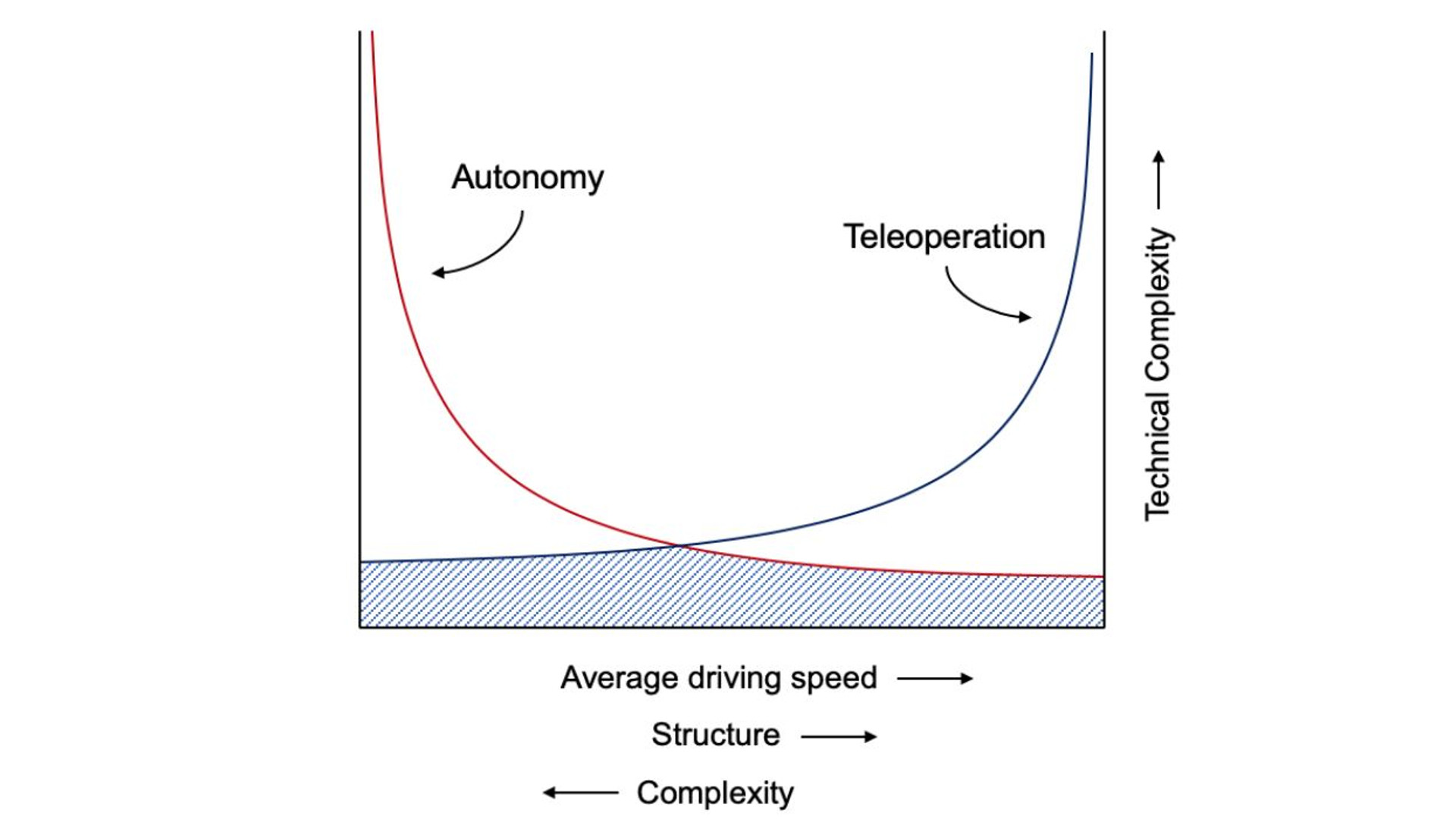
The relationship between tele-operation and autonomy exists because speed is an inverse predictor of driving complexity. That’s a pretty fundamental law of driving, and driving infrastructure.

Interstate highways exist at one end of the speed/complexity relationship. They feature high speed and low environmental complexity because they’re about as structured an environment that exists in the world. Fences prevent pedestrian and animal access. Vehicles enter and exit via smoothly curving on and off ramps. Road curvature is limited to what is easily navigable at 60 miles per hour, and pavement is smooth and well-maintained. This ensures that vehicles can drive at higher speeds.
At the other end of the speed/complexity relationship are truckyards—essentially, the parking lots where tractor-trailers load and unload their goods. Truckyards are among the most complex environments we’ve encountered. Not coincidentally, vehicles move about truckyards very slowly. That’s because other trucks move about these yards in random ways as they reverse and maneuver themselves into appropriate positions. Pedestrians walk to and fro as they get into and out of vehicles. Boxes and curbs can appear in random places. The asphalt can be cracked and potholed. Truckyards are completely unstructured environments, which makes it difficult for autonomy to handle them.
Building autonomy to operate safely on highways is easier than building autonomy to operate safely in truckyards, or any complex, low-speed environment.
Precisely the inverse is true for tele-operation of vehicles. The big limiting factor for tele-operation is the relationship between signal latency and speed. Signal latency refers to the gap between the moment the human tele-operator directs the vehicle to do something, and the moment that the truck actually does it. The higher the vehicle speed, the more problematic signal latency becomes for tele-operation. Tele-operation is easy to do in truckyards because speeds are low in truckyards. It’s rare to encounter vehicles in such environments traveling higher than five miles per hour. Meanwhile, tele-operation is comparatively tough to do on distant highways, where speeds are high.
In fact, these two technologies are inversely synchronous in a remarkable number of parameters. The relationship applies in every driving variable we’ve come across. The very thing that makes tele-op difficult tends to be the same thing that makes autonomy easy—and vice versa.
Because of their compounding nature, and their synchronous relationship, building an autonomous system that can handle 90 per cent of driving, and a tele-op system that can handle 90 per cent of driving, is much simpler and more effective than trying to build one system that is able to handle 99 per cent of driving. Thanks to the puzzle-piece synchronicity of these two technologies, we’re able to take the human drivers out of our trucks much sooner.

Crucially, we’ve found that development of tele-operation capability and autonomy needs to happen together. Since both of them complement each other, they have to be developed congruently, from the beginning, in a manner that perfectly meshes their capabilities.
Which brings us to the Bonneville Salt Flats, and Rollie Free. At the salt flats, there are no buildings, there is no traffic, there are no merging lane lines. It is an environment without complexity. Rollie Free opted to set his motorcycle land speed record on the Bonneville Salt Flats because of the same fundamental law of driving that we mentioned before: Environmental complexity is inversely proportional to driving speed.
Complex things are always harder to do than simple things. Consequently, highway autonomy is easier than urban autonomy. Low-speed tele-op is easier than high-speed tele-op. Between these two very obvious statements exists what amounts to our entire business case: Autonomy is easier at highway speeds and tele-op is easier at slower speeds, and by combining the two it’s possible to take the human driver out of the truck.