Covering the future of mobility can be challenging, given that a lot of the technology that will shape how we get around in the future consists of closely-guarded trade secrets. By the time companies are ready to share what they’ve been working on, it’s usually very nearly ready to be deployed. But there is one way to steal a glimpse at the technology that’s still years away from deployment: patent application filings.
Every week we will review the latest patent applications and share the most interesting ones with you in this new series of regular features. Please keep in mind that these are simply patent applications, and they have not yet been granted. This week, we bring patent applications for Dyson’s new electric vehicle Nissan’s and Waymo’s self-driving technology, VW’s emissions control, NIO’s battery swap, BYD’s computer vision and more.
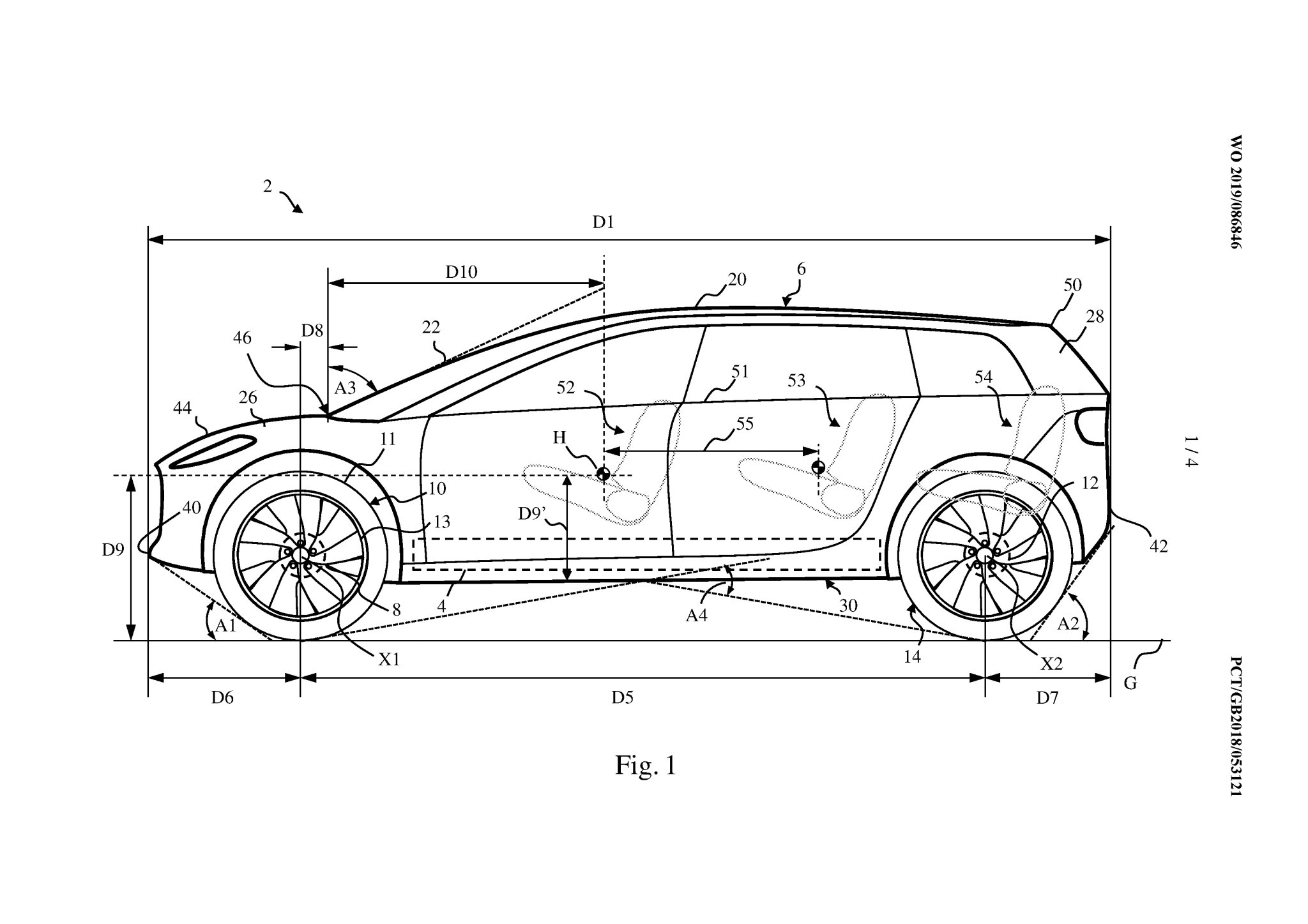
Dyson
Dyson filed two patents this week describing its new electric vehicle, one relating to its windscreen angle of between 25 and 30 degrees and another relating to its wheels having an outer diameter of between 45% and 55% of the overall vehicle height. The patents describe the vehicle’s relatively high ground clearance and corresponding advantages on rough terrain and in terms of visibility, but note that Dyson’s vehicle combines these advantages with a relatively short overall height which lowers the center of gravity and improves aerodynamics. Aero performance is further improved by the relatively shallow windshield angle, while off-road performance and visibility are improved by its short overhangs. Dyson argues that the performance and ride issues traditionally raised by large wheels can be overcome in an electric vehicle, and that its design results in a vehicle that is far narrower than a traditional SUV.

Nissan
Nissan’s autonomous vehicle development program has been keeping such a low profile over the last few years that a lot of people seem to have forgotten that it even exists. But just because they’re not trying to keep up in the hype wars doesn’t mean they aren’t hard at work, and three new patent applications hint at the kind of technology they’re working on.
First up is a patent on “Reinforcement and Model Learning For Vehicle Operation,” that focuses on scenario-specific evaluation and operation. This filing is long and complex, but at a high level it lays out an architecture that breaks down an autonomous vehicle’s route into operational scenarios, generates histories of scenario-specific operation controls, and applies them to similar scenarios until driver overrides fall below a certain level. Driver feedback can also be used in the learning examples to improve future performance, and the learning can be used to create custom scenarios and transfer a learned solution to a similar scenario.
Another Nissan patent lays out “Autonomous Vehicle Operation With Explicit Occlusion Reasoning,” tackling one of the biggest challenges for self-driving cars: how to deal with areas that can’t be seen using onboard sensors. First the system determines the area that can’t be observed, then it computes the probability that an object exists within that region and then uses that probability to traverse the unobserved region.
A third patent application in this series, which were developed along with researchers from the University of Massachusetts, covers a system for “Continual Planning and Metareasoning For Controlling An Autonomous Vehicle“. Another architectural patent based around scenario-specific operational control evaluation modules, this system assesses a planned route, pulls scenarios out of them, ranks the upcoming scenarios, applies the appropriate SSOCEM, and then uses it to determine driving policy and execute vehicle control. All three of these patents provide an insight into this modular approach to AV development, and hint at a possible architecture for a future Nissan autonomous vehicle.

Waymo
Alphabet’s Waymo self-driving vehicle company has two new patents out related to its self-driving technology, one covering “Semantic Object Clustering for Autonomous Vehicle Decision-Making” and another describing a system for “Detecting and Responding to Traffic Redirection for Autonomous Vehicles.”
The former patent application describes Waymo’s method for combining multiple objects into groups as a way to reduce the complexity of driving decisions. As the filing notes, “when there are multiple objects, the number of possible reactions can grow exponentially… for humans, a simple solution to this problem is to “group” certain objects together and respond to those objects as if a singular entity.” The filing continues: “In addition to cutting down the required number of reactions to evaluate and thereby cutting down on unnecessary computation, this approach offer additional benefits. For instance, the approach provides a framework for reacting to semantic classes of object clusters such as accompanied children, funeral processions, etc.”
The second patent application is Waymo’s solution for controlling an autonomous vehicle in a situation where an emergency vehicle, road construction or a collision has blocked a lane requiring the AV to navigate around the unexpected obstacle. By analyzing traffic flow and comparing it to an established map, and/or by recognizing signs proximate to the new corridor, Waymo’s AVs will be able to navigate new corridors that may not be traditionally marked or which may be closer to oncoming traffic than they are normally comfortable with.
A third Waymo patent application published this week is a bit more confusing, as its applicability to the firm’s autonomous drive systems aren’t quite as obvious. This patent describes “Devices and Methods for an Electromagnetic Coil,” and its applications are frankly well over my head. If you think you understand what this patent might be used for, please let me know by emailing ed [at] thedrive [dot] com.

NIO
The Chinese electric vehicle company NIO has no fewer than five patent applications out this week, all relating to its battery swap capabilities and the design of its swap and charging stations. An application covering an “Automatic Battery Swap Station For Electric Vehicle” shows the overall design of a swap station, while the others cover specific aspects like the “Vehicle Position Adjustment System,” the “Battery Transfer Method,” the “Vehicle Positioning Device,” and the “Vehicle Lifting Device.” These patents all show systems in which the car is surrounded by racks of batteries that are carried down and then installed onto the underside of the vehicle.
BYD
The Chinese company BYD is generally known for its electric vehicles, but like all automakers it appears to be getting into automated driving and by extension computer vision. One of its patent applications this week sets forth an image processing method and device, as well as a “method for safe driving” using a pair of cameras. By fusing images from two cameras prior to performing object detection, one of which may be an infrared imaging device, the system claims to improve the accuracy of its identifications. A second patent filed this week allows such a system to switch from a visible light camera to an infrared camera depending on lighting conditions.

Mobileye
The Israeli pioneers of computer vision for automated driving updated a previous patent application from 2017 in a filing covering “Navigation Based On Human Activity.” It’s a sprawling application covering systems and methods that “navigate the host vehicle based on surroundings of the host vehicle, including pedestrians present in the host vehicle’s environment, or based on passengers within the host vehicles. For example, the systems and methods may navigate the host vehicle based on sensed activities of passengers, automated negotiation with pedestrians, sensed pedestrian eye contact, a sensed facing direction of a pedestrian, based on a movement direction and a speed of a pedestrian, based on a sensed pedestrian in a vicinity of a crosswalk, or based on a sensed number of pedestrians.”
Uber
While Uber is going public this week its inventors continue to file patent applications, including one published this week covering “Systems and Methods for Presenting Virtual Content In A Vehicle.” This would allow an autonomous vehicle to pass “data indicative of a planned motion” to a passenger’s virtual or augmented reality system, and render a virtual environment without causing motion sickness. Examples of this is the rendering of virtual screens outside the vehicle on which to render 2D content, indications of the vehicles future path, instructions about where to look for virtual content, all of which would keep virtual content consistent within the path of the vehicle and make viewing it predictable for the occupant. This technology could even be applied to non-autonomous vehicles, displaying crash mitigation information for example.

Volkswagen
Like Uber, Volkswagen as also applied for a patent on technology that applies to in-vehicle uses of virtual reality this week. Like the Uber patent, it also seeks to mitigate motion sickness common to in-vehicle use of VR, but it takes a different approach to the problem by depicting the movement direction of the vehicle in the virtual rendering. VW also filed a patent application this week describing a “Driver Assistance System For An At Least Partially Automatically Driving Motor Vehicle,” as well as more prosaic applications related to “A Method for Regenerating a Soot Particle Filter, as well as a “Method for Operating an Exhaust Gas System.“
Loading comments…
Comments couldn’t be loaded. Please refresh the page.