
A group of researchers at MIT’s Computer Science and Artificial Intelligence Laboratory has developed a system called “NanoMap.” This technology uses a drone’s uncertainty to its benefit allowing for unmanned aerial vehicles to navigate through complex environments at a consistent 20 mph pace. The research team is looking at specific use-cases including search-and-rescue scenarios, defense, and entertainment. Delivery companies using UAVs can incorporate this technology in densely populated areas.
The key ingredient of using a drone’s uncertain position to the system’s benefit was vital in achieving the speed in environments such as warehouses of forests. By forcing the UAV to constantly reconsider its position, obstacle avoidance was continuous.
Graduate student Pete Florence, the lead author of a recent research paper based on similar ideas, stated that the approach employed here is far more reliable than traditional map-based navigation when it comes to thick, concentrated environments. He said, “Overly confident maps won’t help you if you want drones that can operate at higher speeds in human environments. An approach that is better aware of uncertainty gets us a much higher level of reliability in terms of being able to fly in close quarters and avoid obstacles.”
How exactly does NanoMap work? According to MIT, the system uses depth-sensing to measure the vehicle’s surroundings, continuously, thereby allowing it to not only plan for its next moves but for movements a few steps ahead. Added to that, Florence alludes to a kind of artificial intelligence here, in regards to learning from the past and planning for the future. “It’s kind of like saving all of the images you’ve seen of the world as a big tape in your head,” Florence explained. “For the drone to plan motions, it essentially goes back in time to think individually of all the different places that it was in.” The implementation of NanoMap apparently reduced the drone’s crash rate from 25 percent to 2 percent, which is an extraordinary decrease and one that drone delivery companies eager to operate in narrow, inner-city environments are likely eager to employ.
Let’s take a look at NanoMap in action, shall we?
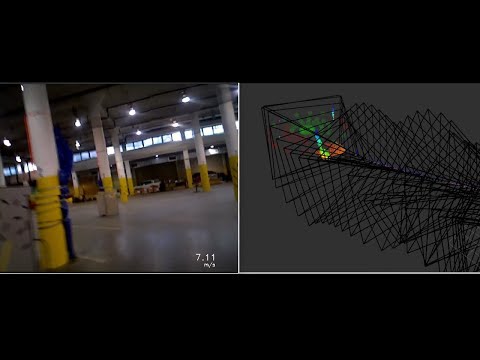
Drone Navigation in Uncertain Environments
Previously, popular approaches to obstacle avoidance in dense environments largely relied on SLAM (Simultaneous Localization and Mapping) technology, which translates the data of a drone’s surroundings and generates maps it can use to navigate. However, according to MIT, this method is less reliable and not as useful to UAVs operating at high speeds. NanoMap, on the other hand, uses only as much information as it needs to plan accordingly for the vehicle’s next steps, allowing for shorter processing and faster reactions. As Sebastian Sherer, a systems scientist at Carnegie Mellon University’s Robotics Institute puts it, “The key difference to previous work is that the researchers created a map consisting of a set of images with their position uncertainty rather than just a set of images and their positions and orientation. Keeping track of the uncertainty has the advantage of allowing the use of previous images even if the robot doesn’t know exactly where it is and allows in improved planning.”
This is a pretty exciting new development regarding autonomous navigation at high speeds, and one that we’ll likely see referenced heavily in the near future when drones begin to fill our skies more and more as time goes on.